Jumping robot for space exploration
Wheel robots, which are used for the exploration of celestial bodies, reach their limits on steep or unstructured terrain. A jumping form of locomotion not only extends the operating range, but is also significantly more energy efficient in environments of low gravity.
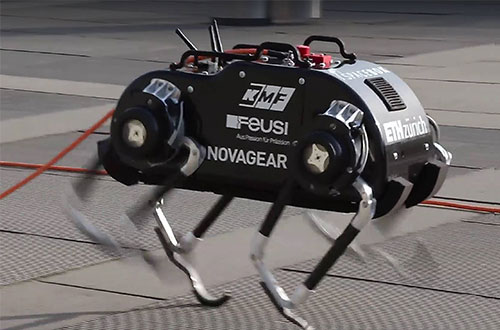
At the ETH Zurich, the focus project team SPACE BOK has set itself the goal of developing and building a four legged jumping robot. One of the numerous challenges was the development of the planetary gears, which transmit the highly dynamic movements of the electric motors to the jump mechanism of the legs. In an intensive collaboration between the SPACE BOK Team and Novagear, it has been possible to reconcile limited space, high torsional stiffness, minimal play and minimal weight.
On May 29, 2018, the performance of the jump robot could be demonstrated to a wide audience.
Novagear thanks the entire SPACE BOK team for this exciting collaboration.