Sprungroboter für Weltraumforschung
Radroboter, welche für die Erforschung von Planeten und Monden eingesetzt werden, stossen bei steilem oder unebenem Terrain an ihre Grenzen. Eine springende Form der Fortbewegung vergrössert nicht nur die Reichweite, sondern ist bei geringer Schwerkraft auch deutlich energieeffizienter.
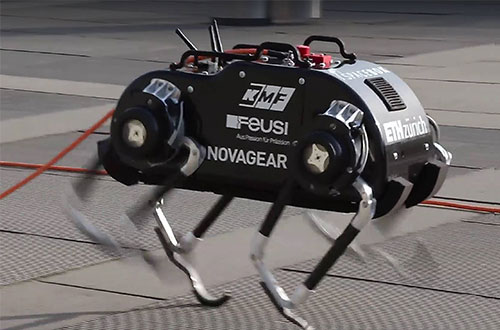
An der ETH Zürich hat sich das Fokusprojekt-Team SPACE BOK zum Ziel gesetzt, einen 4-beinigen sprungfähigen Laufroboter zu entwickeln und zu bauen. Eine der zahlreichen Herausforderungen war die Entwicklung der Planetengetriebe, welche die hochdynamischen Bewegungen der E-Motoren auf den Sprungmechanismus der Beine übertragen. In einer intensiven Zusammenarbeit zwischen dem SPACE BOK Team und Novagear ist es gelungen, beschränkte Platzverhältnisse, hohe Torsionssteifigkeit, minimales Spiel und minimales Gewicht unter einen Hut zu bringen.
Am 29. Mai 2018 konnte das Leistungsvermögen des Sprungroboters vor einem breiten Publikum demonstriert werden.
Novagear dankt dem gesamten SPACE BOK Team für diese äusserst spannende Zusammenarbeit.